ПРИМЕНЕНИЕ СБОРКИ MAXON MOTOR 399505 В КОМПЛЕКТЕ МСВ-04
Применение сборки Maxon Motor 399505 в комплекте МСВ-04
В рамках работ по модернизации учебных комплектов компания ООО «НПФ Мехатроника-Про» получила для испытаний составляющие электрического привода постоянного тока производства Maxon Motors. В состав привода входят:
- Двигатель постоянного тока - RE-max 24 Part Number(PN) 222053

- Планетарный редуктор - GP 22 C PN 143979

- Квадратурный энкодер – MR type ML PN 201940

Соединение данных компонентов представляет собой сборку 399505, готовую для подключению к комплекту МСВ-04, параметры которой представлены в таблице 1.
Таблица 1
|
Параметр |
Значение |
|
RE-max 24 PN 222053 |
|
|
Номинальное напряжение |
24В |
|
Скорость холостого хода |
9250 об/мин |
|
Ток холостого хода |
27,3 мА |
|
Номинальная скорость |
7590 об/мин |
|
Номинальный ток |
0,487 А |
|
Номинальный момент |
11,3 мНм |
|
Сопротивление якоря Ra |
9,02 Ом |
|
Индуктивность якоря La |
0,406 мГн |
|
Момент инерции |
4,27 г*см2 |
|
GP 22 C PN 143979 |
|
|
Передаточное число редуктора |
29:1 |
|
Число ступеней |
2 |
|
Момент инерции |
0,4 г*см2 |
|
MR type ML PN 201940 |
|
|
Импульсов на оборот |
512 |
|
Число каналов |
3 |
|
Напряжение питания |
5В |
|
Потребление тока на канал |
0..5мА |
|
Момент инерции |
0,09 г*см2 |
Стандартный комплект МСВ-04 обладает техническими характеристикам, приведенными в таблице 2, которые показывают, что силовую и управляющую платы комплекта допустимо применять для управления сборкой 399505 производства Maxon Motors.
Таблица 2
|
Параметр |
Значение |
|
Power Card |
|
|
Номинальное напряжение питания |
24В |
|
Максимальный ток |
13 А |
|
Выходное напряжение |
-24..24В |
|
Control Card |
|
|
Напряжение питания энкодера |
5В |
|
Число каналов энкодера |
6 |
Так как технически образец сборки совместим с комплектом, произведем её подключение. Для этого подключим выходной шлейф сборки согласно схеме подключений (Рис. 1) к комплекту в соответствующие разъемы, как показано на рис.
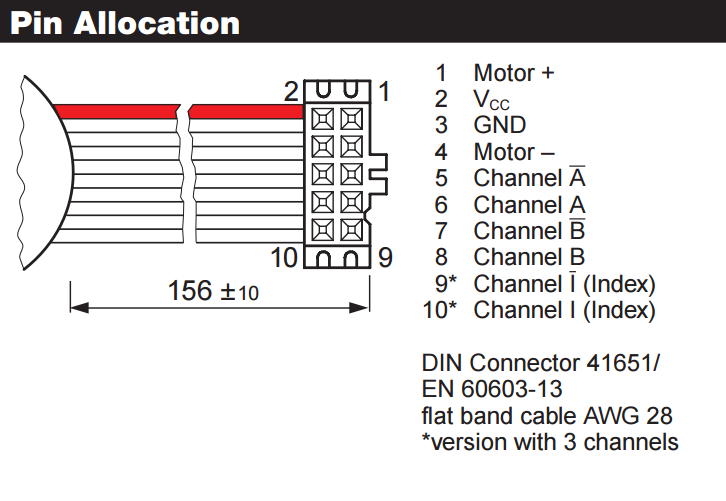
Рис. 1 Схема подключения сборки

Рис. 2 Подключение к комплекту, 1 – Разъемы энкодера, 2 – Силовые разъемы, 3 – Исследуемая сборка
После подключения сборки к комплекту осуществим серию пусков в прямом и обратном направлении для проверки правильности подключения.
Для разработки системы управления двигателем создадим проект в среде разработке программного обеспечения для встроенных систем управления MexBIOS Development studio.
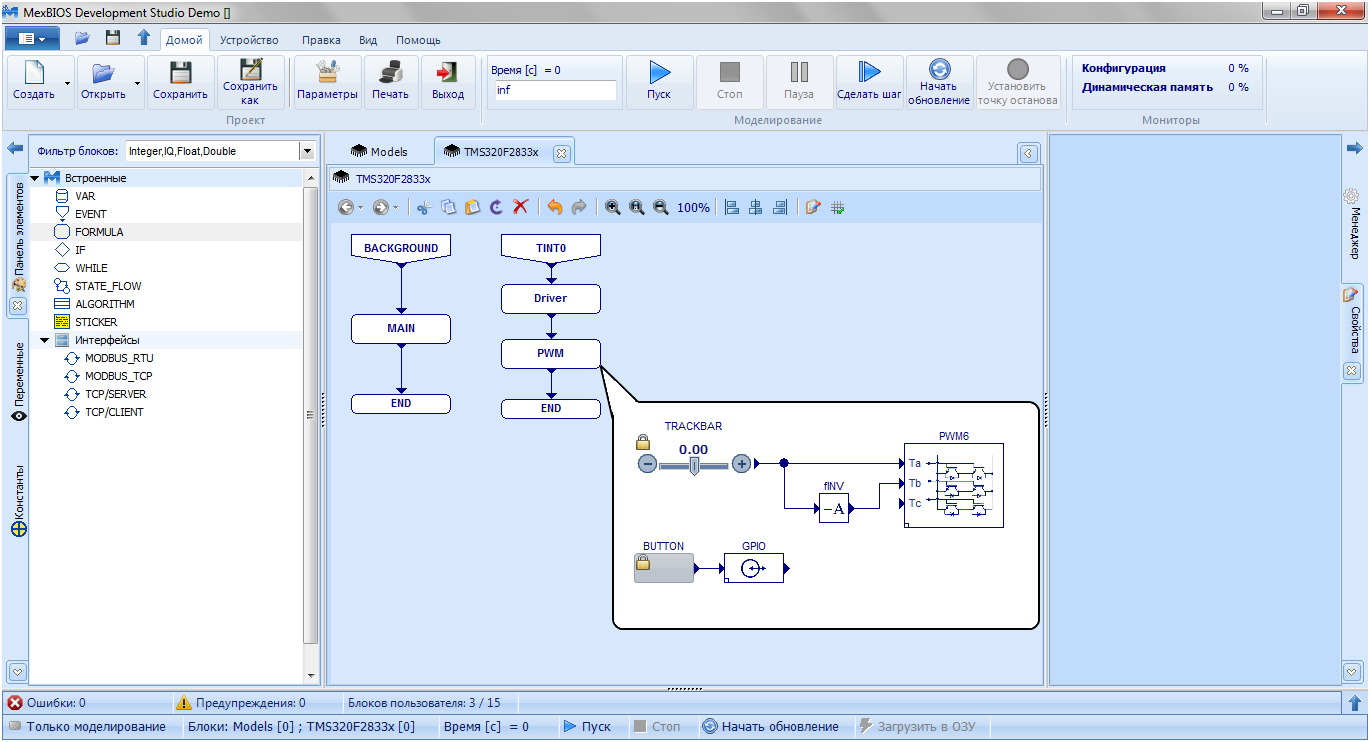
Рис. 3 Базовый проект в среде MexBIOS Development Studio
Параметры блоков и их назначение сведены в таблицу 3.
Таблица 3
|
Тип блока |
Параметры |
Назначение |
|
EVENT |
Источник: 2:Аппаратное Вектор: 26:TINT0 Период: 0.0002 Режим Моделирования: Непрерывный |
Настройка прерывания вызывающего основную программу с частотой 5кГц |
|
FORMULA |
Имя: Driver |
Формула, содержащая в себе блоки датчиков |
|
Имя: PWM |
Формула, содержащая блоки, формирующие задание скважности ключей инвертора |
|
|
TRACKBAR |
Минимум: -0.9 Максимум: 0.9 Шаг: 0.1 Точность: 2 Формат: 31: float Value: 0.0 |
Задание скважности ключей |
|
BUTTON |
Группа: 1 Значение «Отпущено»: 1 Значение «Нажато»: 0 Формат: 0: Integer Value: 1 |
Кнопка разрешение ШИМа с самошунтированием |
|
GPIO |
Type: 1: Output Pin: 31: GPIO31 |
Вывод разрешения ШИМа |
|
fINV |
Инверсия задания |
|
|
PWM6 |
Id: EPWM1-3/GPIO0-5 Frequency: 5000 |
Блок управления ключами инвертора |
После настройки соответствующих блоков подключимся к комплекту и загрузим полученный проект в ОЗУ. После начала обновления, нажатие кнопки BUTTON вызовет зажигание зеленого светодиода PWM на плате управления, однако вал сборки останется неподвижным, так как задание скважности в блоке TRACKBAR равно нулю. Регулируя ползунок в данном блоке, визуально убедимся что двигатель осуществляет реверсирование и изменяет скорость вращения. После чего перейдем к настройке регуляторов.
В общем виде структура системы подчиненного регулирования координат выглядит следующим образом:
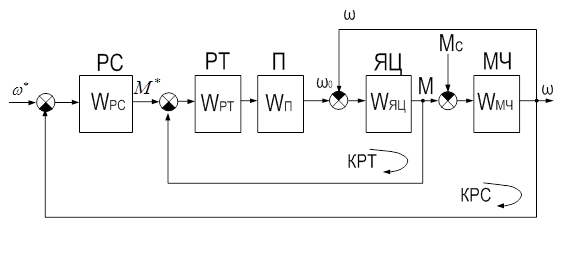
Рис. 4 Структурная схема системы управления
Данная схема учитывает только параметры двигателя сборки т.к. параметры двигателя более чем на порядок больше по сравнению с механическими параметрами энкодера и редуктора, поэтому ими можно пренебречь.
Как видно из структуры для работы контуров регулирования необходимы соответствующие обратные связи, являющиеся показаниями датчиков. Обработкой их показаний занимается формула Driver, структура которой приведена на Рис. 5, а параметры блоков в таблице 4.

Рис. 5 Структура блока Driver
Таблица 4
|
Тип блока |
Параметры |
Назначение |
|
ADC |
Frequency: 7:10714 Chan1: 8:ADCINB0 |
Аналого-цифровое преобразование реализующее измерение тока в фазе U |
|
QEP |
PosMax: 2048 |
Блок подсчета импульсов энкодера, где PosMax – число фронтов импульсов на 1 оборот (4*Число меток на оборот) |
|
fOFFSET |
GainA: 0.000415 |
Блок автоматически за указное время установит необходимое смещение АЦП, методика определения коэффициента масштабирования описана ниже |
|
fSPEED_CALC |
SampleTime: 0.0002 BaseSpeed: 9250 |
Блок определяет скорость вращения ротора исходя из показаний QEP и номинальной скорости вращения. Результат получается в о.е. |
|
fGAIN |
Gain: 9250 |
Перевод из о.е. в Об/мин |
|
TP_OUT |
Тег: Current |
Передача значения тока в блок PWM |
|
Тег: Speed |
Передача значения скорости в об/мин |
|
|
Тег: Wr |
Передача значения скорости вращения ротора в о.е в блок PWM |
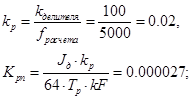
Коэффициент масштабирования можно определить по следующей методике:
- Подключить в цепь якоря мультиметр для измерения тока якоря
- Запустить двигатель и в установившемся режиме зафиксировать некое среднее значение тока
- Используя показания метки LCurrent (Блок Label) определить масштабирующий коэффициент, разделив реальный ток на показания модуля АЦП и занеся полученное значение в качестве параметра GainA блока fOffset.
Настройку системы подчиненного регулирования будем выполнять по известным методам настройки контуров. В первую очередь настраиваем внутренний контур тока на модульный оптимум:
Определим параметры регулятора контура тока:

Для проверки качества настройки контура необходимо собрать схему, обеспечивающую мгновенный реверс. Для этого дополним схему собранную ранее в формуле PWM блоками приведенными в таблице 5 и на Рис. 6.
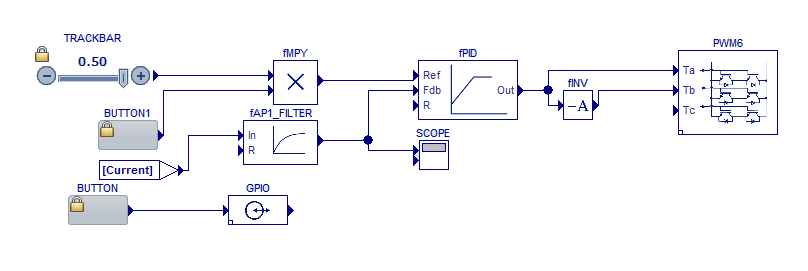
Рис. 6 Структура блока PWM при настройке контура тока
Таблица 5
|
Тип блока |
Параметры |
Назначение |
|
TRACKBAR |
Минимум: 0 Максимум: 0.5 Шаг: 0.1 Точность: 2 Формат: 31: float Value: 0.0 |
Задание тока |
|
fMPY |
Задание знака тока |
|
|
Button1 |
Группа: 0 Значение «Отпущено»: 1 Значение «Нажато»: -1 Формат: 31: float Value: 1 |
Кнопка Реверса |
|
fAP1_Filter |
SampleTime: 0.0002 Tf: 2 |
Фильтр первого порядка для уменьшения колебаний в канале тока |
|
fPID |
Kp: 1.616 Ki: 0.1213 Kc: 0.1213 Kd: 0 Min: -0.9 Max: 0.9 |
ПИД-регулятор контура тока. |
|
TP_IN |
Тег 1:Current |
Входной сигнал с блока АЦП |
Запуск данной схемы позволит нам визуально оценить скорость реакции привода на изменение знака задания.

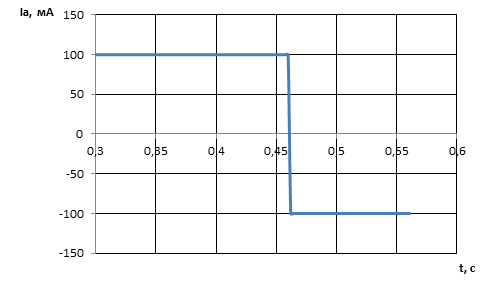
Рис. 7 Работа контура тока в режиме реверсирования сигнала задания
Внесем посчитанные коэффициенты в блок ПИД-регулятора и проведем аналогичное исследование. Реверсирование после внесения коэффициентов должно выполняться с такой же скоростью как и в предварительном эксперименте.
После успешной настройки контура тока настроим контур скорости:
Следует обратить внимание на то, что при работе с двигателями обладающими крайне малой инерционностью, формулы настройки на симметричный оптимум несколько отличаются от стандартных.
Таблица 6
|
Тип блока |
Параметры |
Назначение |
|
fPID1 |
Kp: 0,399 Ki: 0.002363 Kc: 0.002363 Kd: 0 Min: -0.4 Max: 0.4 |
ПИД-регулятор контура скорости. |
|
TP_IN |
Тег 1:Wr |
Входной сигнал с блока Speed_Calc |
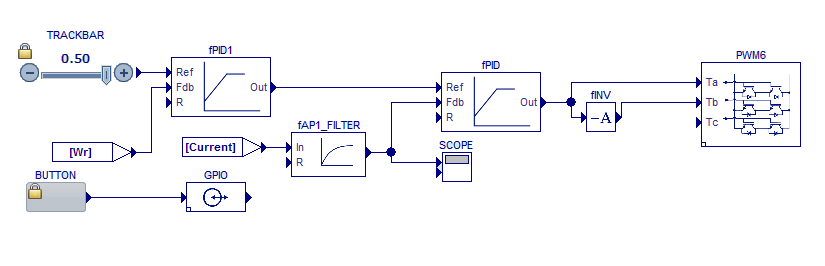
Рис. 9 Результаты работы контура скорости
Подключим третий контур системы – контур положения для получения позиционного следящего электропривода – электропривода отрабатывающего поворот выходного вала на необходимый угол без соблюдения траектории перемещения.
Особенностью таких систем можно считать то, что в установившемся режиме скорость может носить незначительный колебательный характер ввиду некоторых пренебрежений в процессе расчета. Одним из простых способов снизить влияние данных эффектов в среде MexBios – это понижение частоты расчета отдельного элемента или группы элементов, данный подход позволяет в рассматриваемом случае вызывать расчет регулятора положения с меньшей частотой, что приводит к снижению колебаний в установившемся режиме без изменения статической ошибки. Однако не следует задавать чрезмерно низкую частоту вызова блока, оптимальным значением будет коэффициент делителя, лежащий в пределах 5..100 в зависимости от быстродействия двигателя.
Реализация такого алгоритма выглядит следующим образом:
В первую очередь необходимо внести изменения в основном теле программы как показано на Рис. 10, и таблице 7
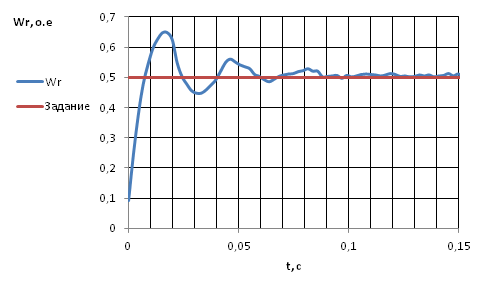
Рис. 10 Основная программа для работы с тремя контурами регулирования
Таблица 7
|
Тип блока |
Параметры |
Назначение |
|
Var |
Имя: VAR Формат: 0:Integer |
Переменная-Флаг для сигнализации о совершенном понижении расчета |
|
If |
Условие: 1: Равно Значение 1: 1:VAR Значение 2: Константа = 1 Формат: 0:Integer |
Блок условия выполнено ли понижение частоты расчета или нет |
|
Formula |
Имя: Pos_Loop |
Контур положения |
После чего перейдем в формулу Driver и добавим необходимые метки перехода и блоки делителя частоты, как показано на Рис. 11
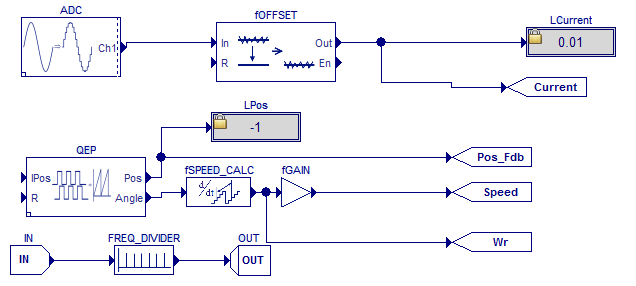
Рис. 11 Формула Driver для контура положения
Таблица 8
|
Тип блока |
Параметры |
Назначение |
|
IN |
Формат: 0: Integer Value: 100 |
Задание коэффициента делителя kделителя |
|
FREQ_DIVIDER |
Блок делителя частоты расчетов |
|
|
Out |
Формат: 0: Integer Переменная: 1:VAR |
Выходной флаг события деления частоты |
|
TP_OUT |
Тег: Pos_Fdb |
Передача значения тока в блок Pos_loop |
Теперь перейдем в формулу Pos_Loop которая содержит в себе блок регулятора положения. Рис. 12.

Рис. 12 Контур положения
Таблица 9
|
Тип блока |
Параметры |
Назначение |
|
fPid |
Kp: 0.000027 Ki: 0 Kc: 0 Kd: 0 Min: -1 Max: 1 |
ПИД-регулятор положения |
|
IQTOF, IQTOF1 |
Format: 0:Integer |
Блок смены формата данных |
|
TP_IN |
Тег: Pos_Ref |
Задание угла поворота |
|
Тег: Pos_Fdb |
Текущее значение угла поворота |
|
|
TP_OUT |
Тег: Wr_ref |
Задание для регулятора скорости |
Расчет коэффициента настройки регулятора положения можно произвести по следующим формулам:
После чего перейдем в блок PWM для внесения корректировок согласно Рис. 13

Рис.13 Блок PWM для контура положения
Таблица 10
|
Тип блока |
Параметры |
Назначение |
|
IN |
Формат: 31: Float |
Блок задания угла поворота, в режиме реального времени (осуществляется через окно наблюдения переменных) |
|
TP_OUT |
Тег: Current |
Передача значения тока в блок PWM |
|
TP_IN |
Тег: Wr_ref |
Задание скорости |
В результате получаем систему управления следящим электроприводом, где задание угла поворота в количествах импульсов энкодера записывается в блоке In. Результаты работы электропривода положения продемонстрированы на Рис. 14, Рис. 15.

Рис. 14 Скорость вращения вала при отработке задания угла поворота
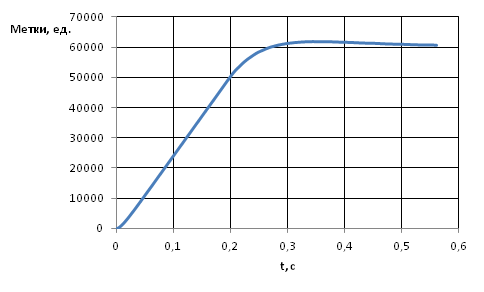
Рис. 15 Положение ротора
Использованные ресурсы
- http://www.aviton.spb.ru/
- http://www.maxonmotor.com/maxon/view/content/index
- http://mechatronica-pro.com/